|
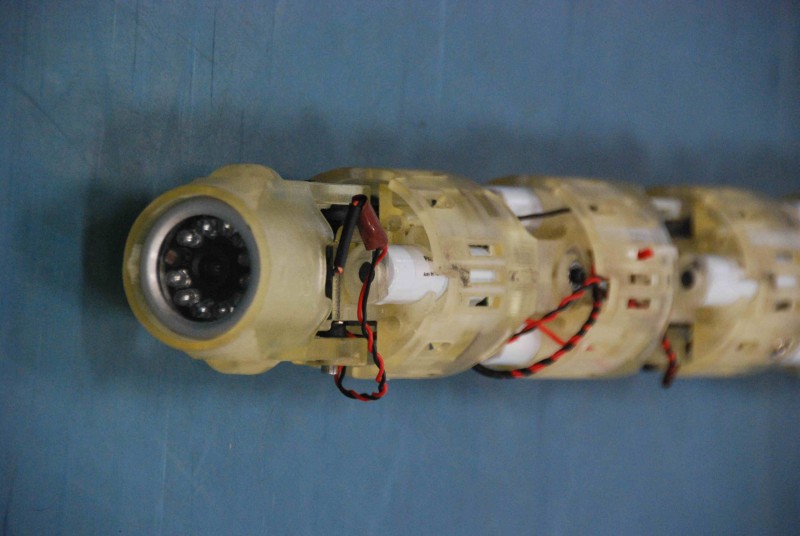
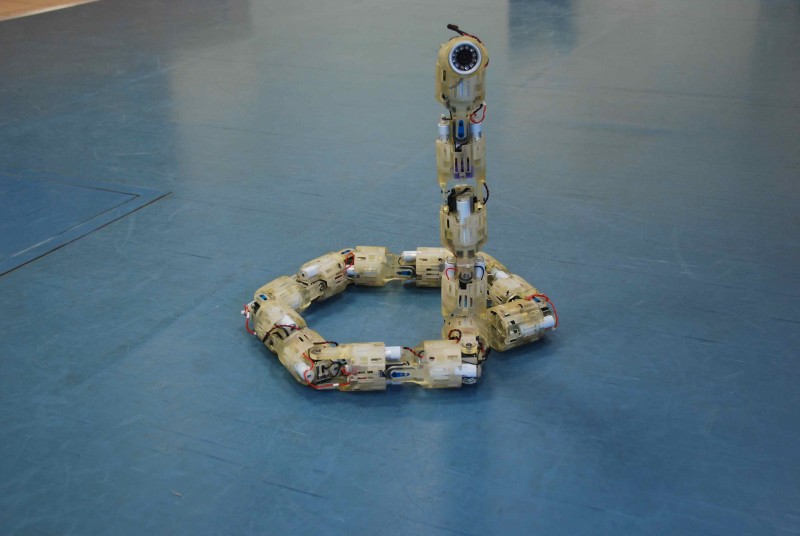
A redundant robot has at least one extra degree of freedom (DOF) than required, in order to compensate for simple constraints, i.e., using an elbow up versus an elbow down configuration, to reach a target position. Hyper-redundant robots have many more DOF than required, enabling them to handle more constraints, such as those presented in highly convoluted volumes, while at the same time enabling them to perform a variety of tasks. In our work, we investigate the kinematics, design criteria, and control strategy for these complex mechanisms, and how to utilize their inherited redundancy to better execute a task. We focus my work on hyper-redundant robots which are either mounted to a fixed base (sort of an elephant trunk), or are not-constrained (like a snake robot). |
 CONTACT THE LAB
CONTACT THE LAB