|
Hyper flexible beams are very common in continuum manipulators and soft robotics. When working with humans, animals or other delicate objects safety considerations are of primary importance. Using compliant, light weight actuators and structural components yields inherently safer mechanisms. However, compliant manipulators are difficult to control and additional sensors are for shape tracking.
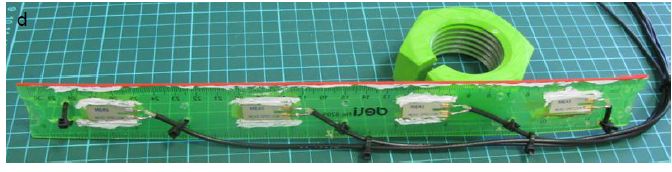
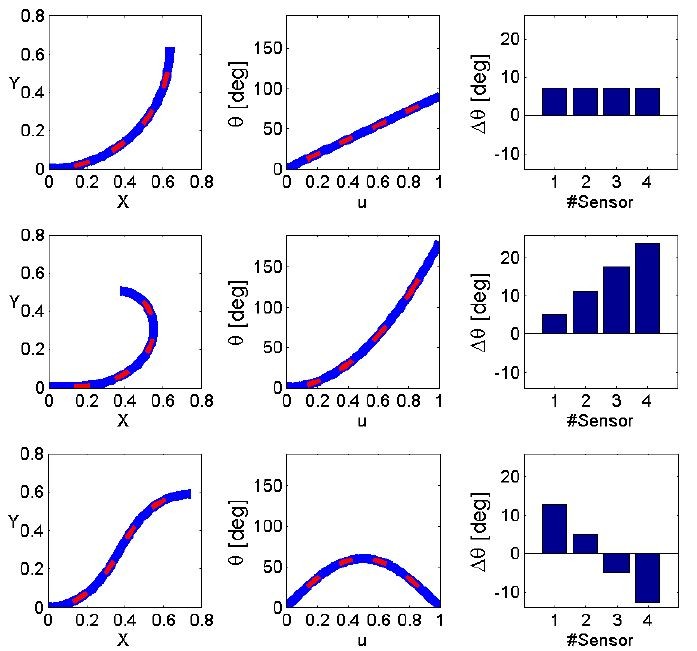
Polyvinylidene fluoride (PVDF) may be fabricated into thin piezoelectric sheets, which may be used as low capacitance (~1.5nF) strain sensors. Laminating a PVDF sensor effectively transform it into a deflection sensor. We were able to embed PVDF sensors on a hyper-flexible ruler (figure 1) and retrieve the low-frequency information. The deflection readings were used for shape reconstruction via the backbone's tangent angle θ. The deflection-sensor principle is demonstrated for three cases in figure 2: a 2D curve can be described by θ and the PVDF sensors measure differences of θ, i.e. Δθk. In the reconstruction proccess we use the scalar values Δθk to interpolate a continous tangent angle function. The interpolation is defined as a linear problem, using localized quadratic Bspline basis-functions, where the resulting function must comply to a set of differences rather thatn a set of values.
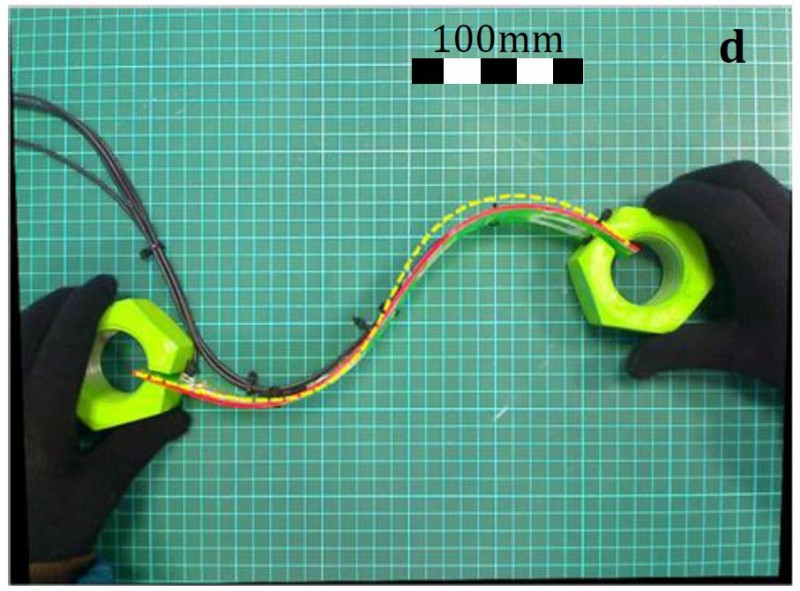
Our approach is suitable for a wide range of shapes, as demonstrated in figure 3 and can be used for monitoring motion as shown in the video (the reconstructed curve is depicted by the yellow line). |
 CONTACT THE LAB
CONTACT THE LAB