|
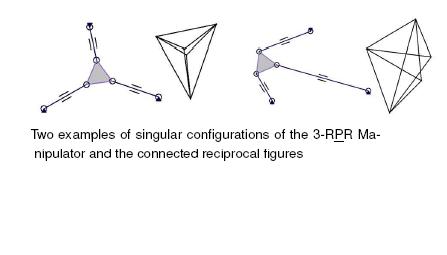
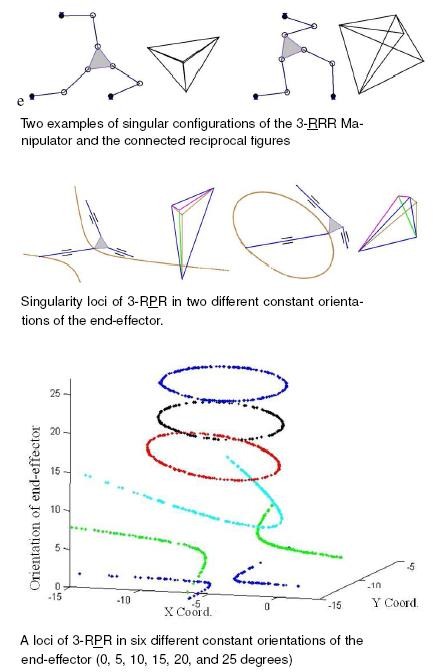
In order to identify singular configurations of planar parallel manipulators (PPM) a new graphical method, which is based on Maxwell’s Reciprocal Theory, is explored. Screw theory and line geometry tools are used to form a new graphical construction called the Mechanism’s Line of Action Graph (MLG). The configurations where the MLG has a corresponding connected reciprocal figure imply a singularity type-II of the manipulator. This singularity analysis tool is also used to trace the singularity loci of the PPM. |
 CONTACT THE LAB
CONTACT THE LAB