|
Long, slim robots with multiple joints are often termed 'continuum robots' and usualy have colorful names inspired by the animal kingdom: snakes, elephant trunks or octopus arms. Continuum robots have many degrees of freedom (DOF) and are therefore labeled as ‘Hyper-Redundant-Robots’ (HRR) – in fact they are very useful and not redundant at all! Various groups and companies are developing continuum robots for minimal-invasive-surgery (MIS), search-and-rescue (SAR) missions and more.
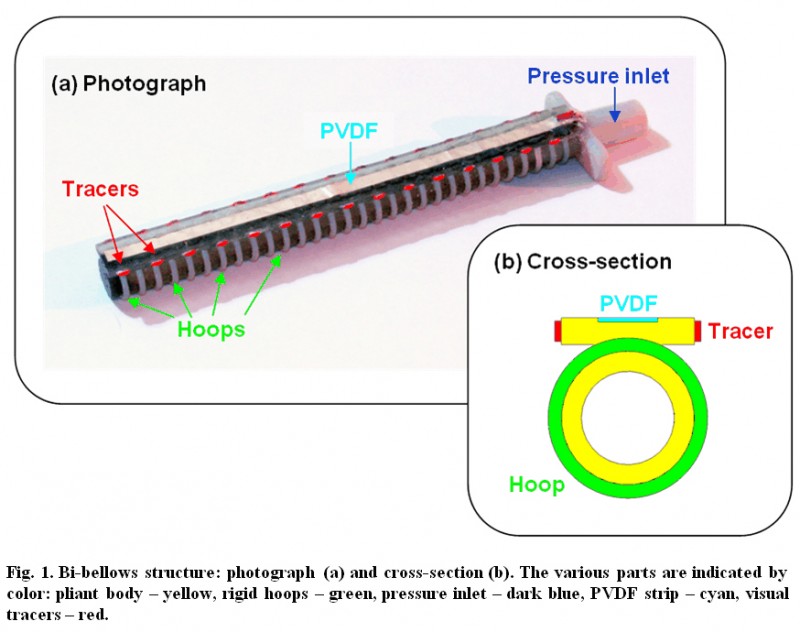
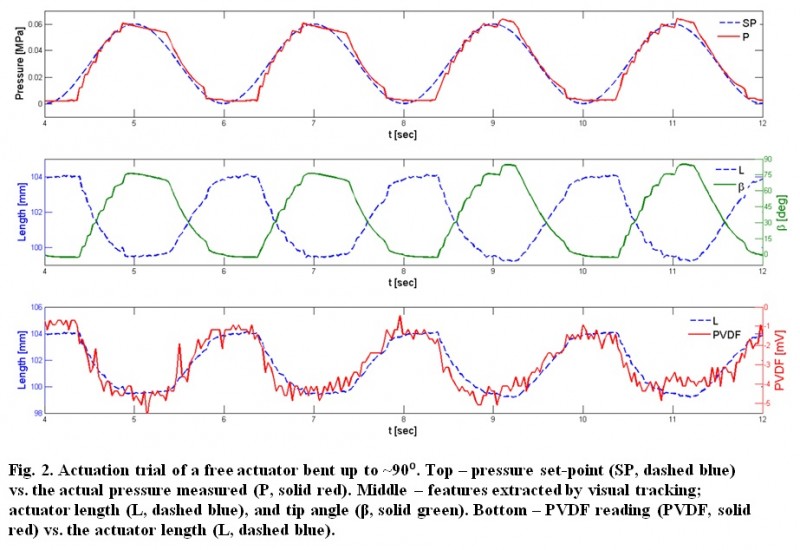
In this work we intend to explore the kinematics of flexible continuum HRR, while taking into consideration the effect of external loads emanating from payloads and obstacles. While flexibility presents a control challenge this compliancy enhances safety features which are vital in human-robot interactions. We developed a simple pneumatic actuator, the Bi-bellows, shown in Fig. 1. Since the actuator is flexible it must be ‘intelligent’ enough to track its own shape or to detect external forces. To this end we used a polyvinylidene fluoride (PVDF) sensor, and adjusted it to monitor low frequency deflections, initial results are shown in Fig. 2.
Published paper on the actuator:
http://brml.technion.ac.il/publications_files/1307386868.pdf
Submitted paper on the PVDF sensor:
http://brml.technion.ac.il/publications_files/1309761449.pdf |
 CONTACT THE LAB
CONTACT THE LAB