|
Robotic medical systems for surgery solve many problems encountered by conventional surgery – they enable the surgeon to apply a different scale of forces, improve his dexterity and accuracy, and can introduce safety features in risky operations. For a robotic medical system to be successful it is vital that the surgeon is able to control the system easily and intuitively.
Some medical robotic systems achieve this goal using haptic control, i.e. a system where the operator controls a robotic device while maintaining online force feedback information from the robotic system itself. Different approaches for haptic control of medical systems have been suggested and investigated. The two major approaches differ in the type of information conveyed to the user by the force feedback – it can convey the forces acting on the end-effector representing impact and tremor, or location deviation induced by the surroundings representing geometry and texture. The control scheme implemented for a certain setup determines the whole system's characteristics such as range, stability, accuracy and transparency.
Another important concept in medical robotics is image free systems – this means the systems is able of intra-operational planning and does not have to relay on Pre-operative acquired information. This approach has economic benefits as it makes expensive procedures like MRI redundant, and hopefully will prove to be faster than existing methods.
This work is about developing haptic capabilities for an image free medical robotic system. To be more specific we will develop a haptic control system for intra-operative surface acquisition for joint arthroplasty.
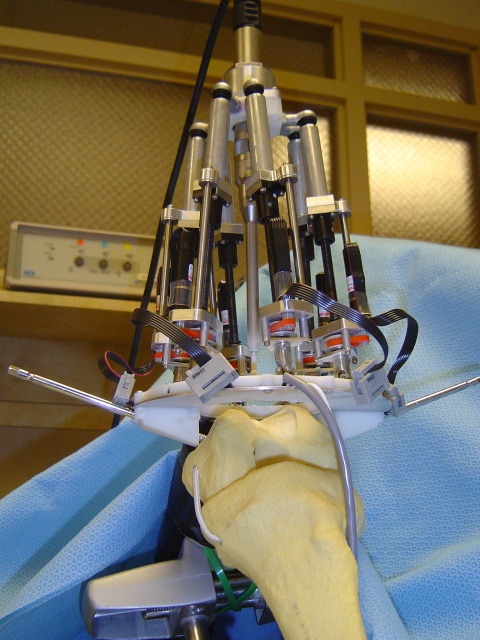
Without loss of generality, an 'Mbars' robot will be controlled by a haptic controller known as 'PHNToMtm desktop'. Both units and a 3 DOF force sensor will be integrated in purpose to enable human intervention and adjustment during robotic surgery. The challenge is to make all sub-systems work together in real time, in a stable, comfortable and intuitive manner. Dynamics of first two elements must be considered, and also problems resulting from communication and computation limits. The means to achieve this is to introduce a carefully designed control system, perhaps with an adaptive control law.
The specific procedure in mind is surface acquisition, which broadens the scope of the thesis. If the bone surface is probed at enough locations, a 3D map of the knee can be created. This 3D image could replace traditional techniques like MRI and CT, and hopefully prove to be reliable and with less costs and side effects. A probing and reconstructing procedure needs to be developed, taking into consideration a tradeoff between acquisition time, computability and accuracy. |
 CONTACT THE LAB
CONTACT THE LAB